在点火模块领域健科电子产品基本涵括全球所有车型对应的产品,包括很多复杂点火系统的点火模块,如多次点火功能,带判缸功能的点火模块,离子流检测模块等等。
健科的微电机控制器覆盖了电机控制的FOC、SVPWM以及方波所有的控制方式。在微电机控制器、传感器及其它汽车电子产品上,健科有丰富的CAN协议、LIN协议、BSD协议、SPI协议等经验,并都有成熟的产品。
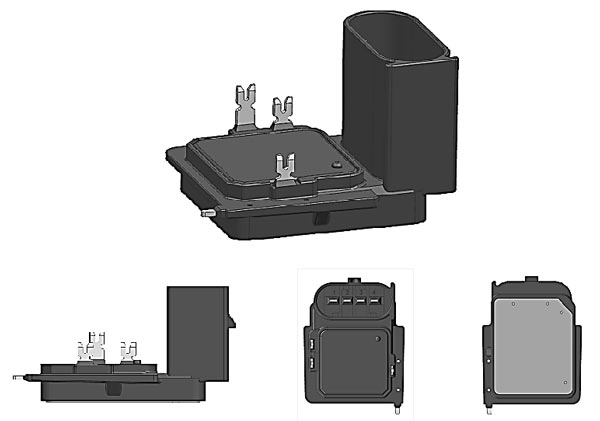
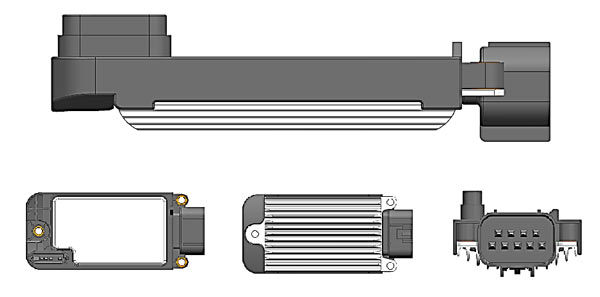
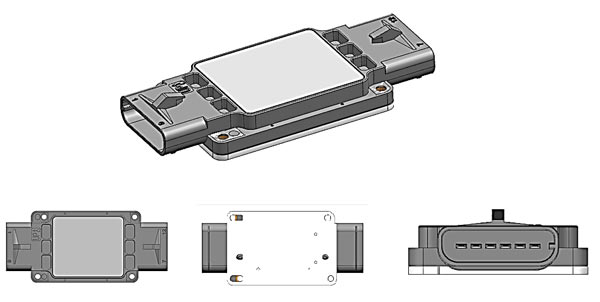
JK-M143 Series
功能特征
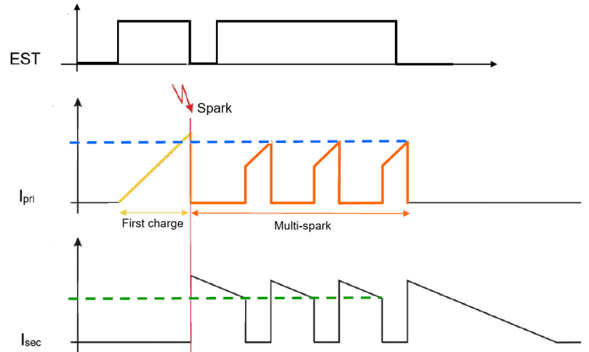
1、多次点火功能
2、初次级电流检测
3、初级电流反馈
4、初级电流限流关断保护
5、多次点火时间保护
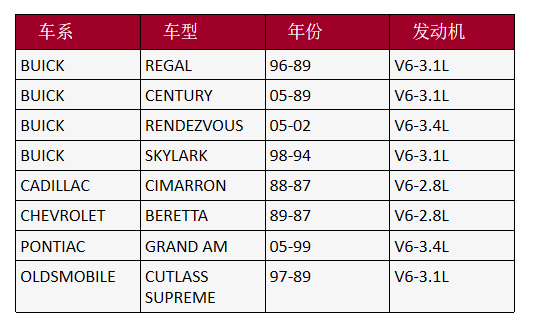
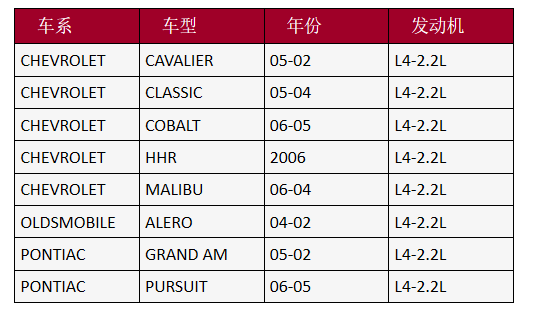
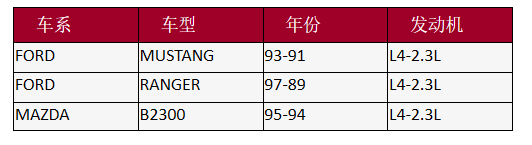
应用车型

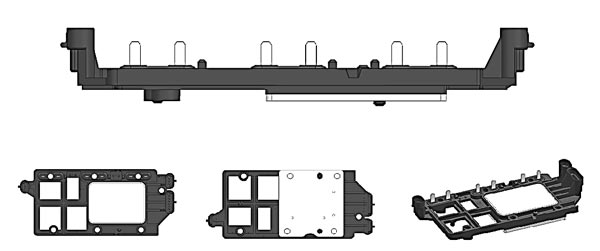
JK-M153A-001
功能特征
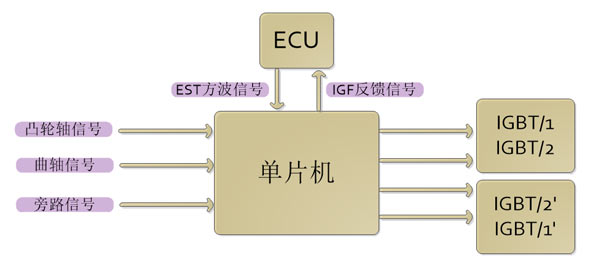
1、判缸
2、点火时序分配
3、转速信号输出
4、闭合角调整
5、双工作模式切换
应用车型
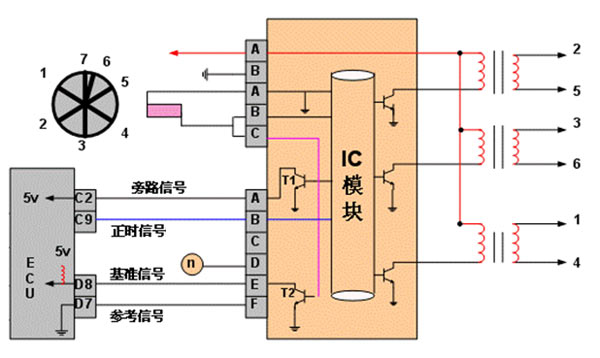
JK-M155A-001
功能特征
1、次级点火信号感应
2、判缸信号输出
3、点火时序分配
4、时间保护
应用车型
JK-M157A-001
功能特征
1、判缸
2、点火时序分配
3、点火信号反馈
4、双工作模式切换
应用车型
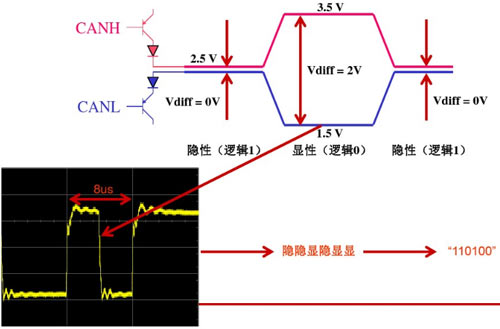
控制器局域网CAN(Controller Area Network),最初是由德国BOSCH公司设计的,应用于气的的监测和控制。
1991年9月,Philips半导体公司制定并发布CAN技术规范:CAN 2.0A/B。1993年11月,ISO组织正式颁布CAN国际标准ISO11898。
CAN总线电平标称值
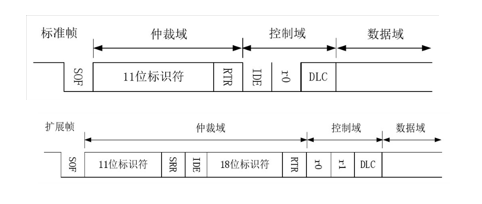
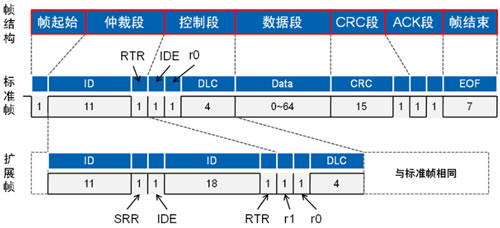
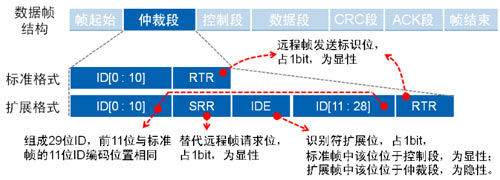
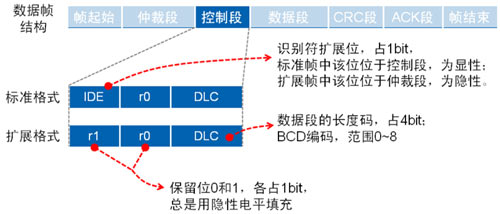
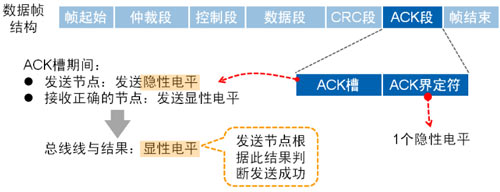
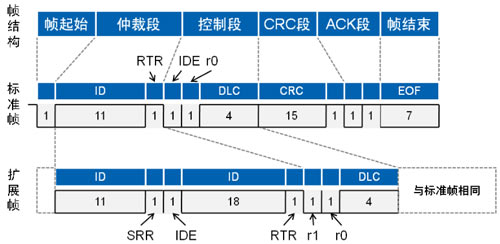
数据帧
结构上由7个段组成,帧起始、仲裁段、控制段、数据段、CRC段、ACK段和帧结束(VBUS/2)进行比较。图下图显示了实现该方法所用的电路。

远程帧
与数据帧相比,远程帧结构上无数据段,由6个段组成,同 理分标准帧格式和扩展帧格式,且RTR位为1(隐性电平)。
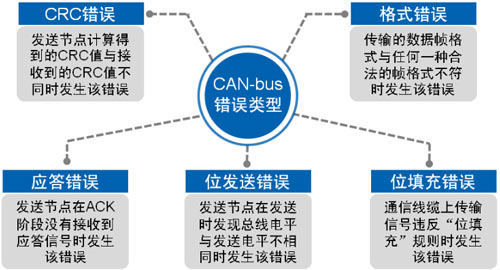
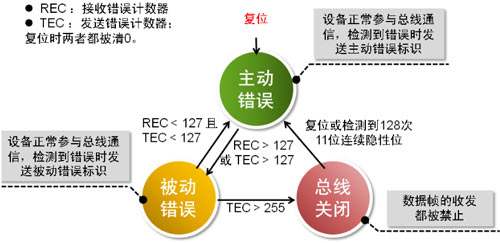
错误帧
尽管CAN通讯的可靠性很高,但是依然可能出现错误。错误类型有一下五种。
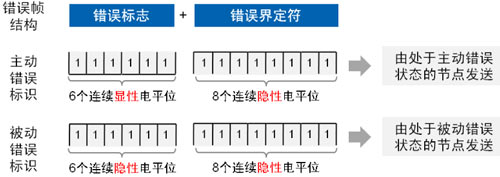
为防止自身由于某些原因导致无法正常接收额节点一直发送错误帧,干扰其他节点通信,CAN BUS 规定了节点的3种状态及其行为。
过载帧
当某个接收点没有做好接受下帧数据的准备时,将发送过载帧以通知发送节点,过载帧由过载标志和过载界定符组成。
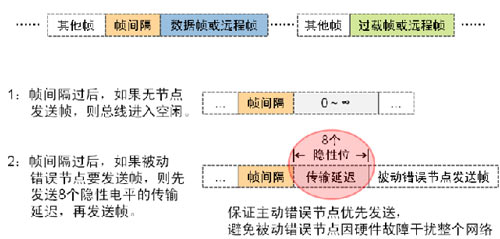
帧间隔
帧间隔用于将数据帧或远程帧和他们之间的帧分离开, 但过载帧和错误帧前门不会插入帧间隔。
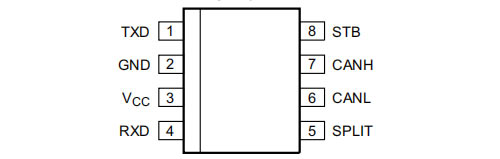
CAN BUS IC典型分类及代表
高速CAN: TJA1042T
低速/容错CAN:TJA1054T
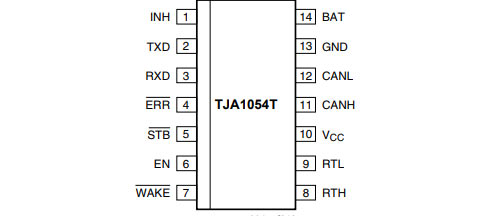
低速/容错CAN:TJA1054T
LIN Bus

汽车四大通讯协议: LIN、CAN、FlexRay、MOST
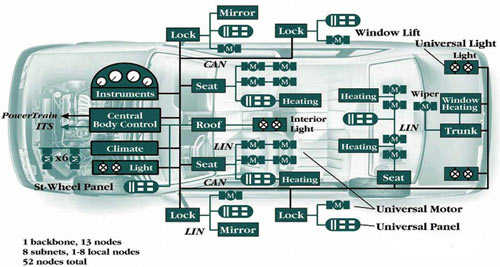
LIN总线是针对汽车分布式电子系统而定义的一种低成本,低速的串行通讯网络,是对控制器区域网络(CAN)的一种补充。LIN总线是基于SCI(UART)数据格式,采用单主控制器/多从设备的模式,是UART中的一种特殊情况
LIN总线的特点及结构
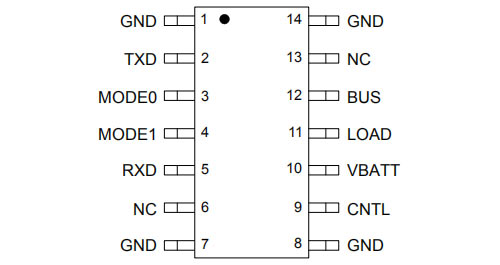
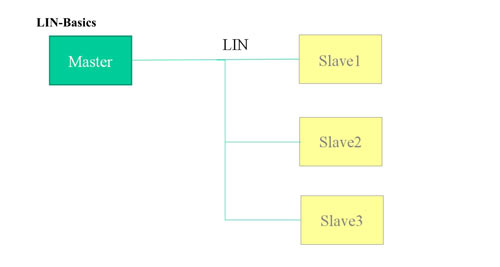
单总线(+GND和Vbat)
主/从概念
只有 1 个主节点 ,多个从节点
主节点控制着总线
总线速度 9600...1920Bit/s
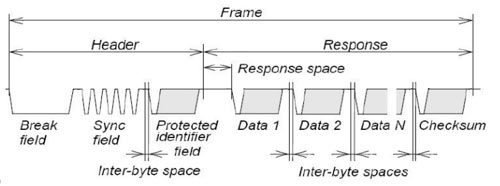
在 LIN 总线上传输数据帧是由下列元素组成的最小单位:
间断、同步、帧标识符、数据字节(1...8)和校验和
间断、同步、帧标识符(Header)总是靠主节点传输
数据字节由主节点或一个从节点提供,取决于这个主节点和从节点是否为帧的发布者
帧的节点任务是在 LIN 描述文件(LDF)中定义的,每个帧(帧标识符)被指定为一个发布者的节点
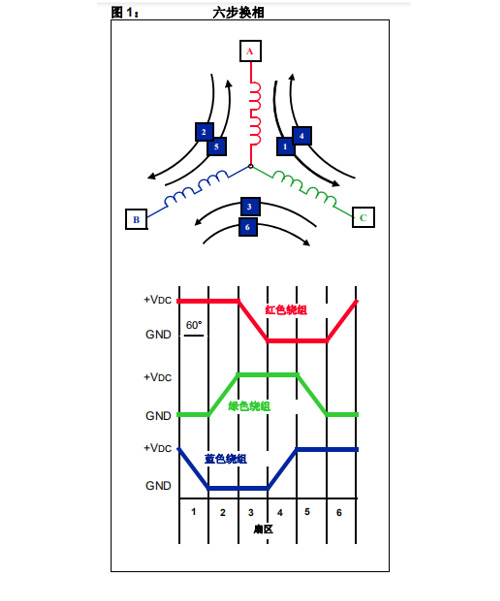
BLDC方波控制
BLDC 电机在传统上被定义为一个具有梯形反电动势波形形状的永磁同步电机。
由于电励磁必须与转子位置同步,因此 BLDC 电机在运行时,通常需要一个或多个转子位置传感器。由于成本、可靠性的原因,电机适宜在无位置传感器的条件下运行,即通常所说的无传感器运行。通过检测不通电相绕组上的BEMF电压可以确定电机驱动电压的换相时间。
无位置传感器算法优点:
1.节省器件成本和安装成本。
2.提高稳定性,位置传感器芯片在高温,高湿换相下易损坏。所以健科电子推出无位置传感器控制技术,很好解决上述问题。

BLDC无位置传感器控制的两种算法
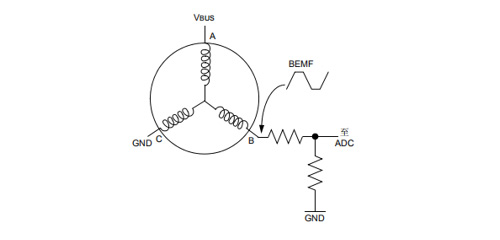
过零点检测法
BEMF电压与直流母线电压的一半进行比较该方法是在假定BEMF电压等VDC/2时发生过零事件的情况下,利用比较器将 BEMF 电压与直流母线电压的一半(VBUS/2)进行比较。图下图显示了实现该方法所用的电路。
优点 :运算量小,可以实现高转速
缺点:不够灵活。
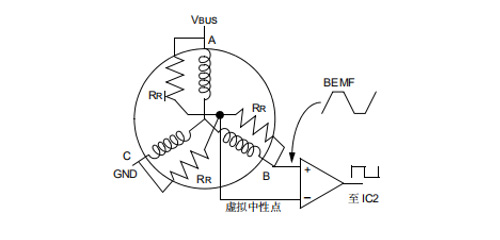
电压比较法
可以通过使用可变阈值电压点检测过零事件来加以简化。该可变电压就是电机的中性点。大多数 BLDC 电机的中性点不会用导线引出。但可以用电阻网络来构造中性点。将三个电阻 的一端分别与电机的三相绕组并联,另一端连在一起以产生一个虚拟中性点,如下图所示。
优点 :算法灵活多变,可实现快速启动。
缺点:运算量大,算法复杂。

健科电子无位置传感器的BLDC方波控制方案优势:
1. 更宽的调速范围。
传统的控制算法,某一时刻,只有一个上桥和一个下桥导通,健科电子的优化了算法,再两两导通基础上,增加了三三导通,提高了导通角,从而增加转速。
缺点:运算量大,算法复杂。
2. 更快的启动性能。
健科电子的快速启动算法,已经应用在燃油泵,可确保150ms内,启动到最高转速。
3. 高鲁棒性。
健科电子使用MCU的比较器检测电机BEMF,降低成本的同时,可实现更复杂的软件算法,从而提高鲁棒性。
电话: 0731-88552129(人事)
电话: 0731-88081666(销售)
邮箱: sales@jkaec.com
地址: 长沙市望城经济技术开发区
航空路10号
电话: 0755-25214880
传真: 0755-25227666
邮箱: sales@ignition-module.com
地址: 深圳市盐田区北山道北山工业区3栋


电话: 0731-88552129(人事)
电话: 0731-88081666(销售)
邮箱: sales@jkaec.com
地址: 长沙市望城经济技术开发区
航空路10号
电话: 0755-25214880
传真: 0755-25227666
邮箱: sales@ignition-module.com
地址: 深圳市盐田区北山道北山工业区3栋

